When I was with Entrotec, my design tasks have required me to jump into my company’s mature source code and to make compatible systems and devices based upon a previously unknown foundation. During this time I have became acquainted with new micro-controllers such as PIC micros, while working extensively with concepts such as RS232, RS485, RF Transmission/Receiving to extending my knowledge with further education into design with Solidworks, designing for production and experimenting with new sensor systems (thermopile pixels and microwave doppler detection).
Over the course of my Honour’s Degree in Robotics and Mechatronics, I had been required to undertake 4 major projects and 7 minor projects. The minor projects ranged from C-Programming challenges, MSP430 design challenges, ROS-Network Projects and electronic circuit design projects.
The various modules which formed the basis for these projects are:
- Mathematics 1 & 2
- Engineering Design and Analysis 2 & 3
- Intelligent Robotics and Mechatronics
- Control and Instrumentation Systems 1 & 3
- Electrical Principles and Circuit Theory
- Digital and Programmable Systems 1 & 2
- Signals and Electronic Design Theory
Subsequently the skills acquired undertaking these modules span numerous different areas of Computer, Electronic and Robotic engineering. These include mechanical engineering, electronic circuit design, control and instrumentation implementations and computer programming on various systems:
- C and RobotC programming (Arduino, Teency Bit, MSP430 and NXP FRDM-KL25z)
- VHDL (Nexys-2)
- LADDER (Toshiba PLC Systems)
- Basic (ASEA/ABB robotic arm gripper)
- LABview (ROS Network, Turtlebot)
These skills were eventually solidified while undertaking the various integrated projects and final honour’s project. The projects ranged from;
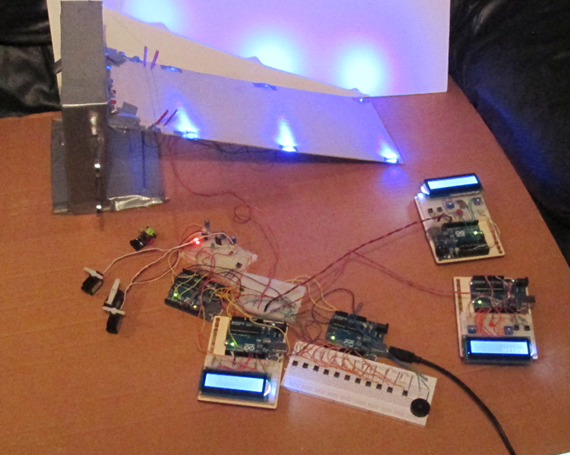
- The conceptualization, design and construction of an electronic educational toy/experiment center. The idea was to make science fun in primary schools while allowing ideas such as the relation between average speed, acceleration and force to be easily demonstrated alongside engineering concepts such as telecommunication to be played with (via morse code transmission).
- The next project was with regards to creating an Internet of Things medical peripheral. What was eventually conceptualized and constructed was a medical smart glove with built in sensors which would allow the wearer to take medical readings from patients in a hygienic way with a connection to an offsite central database (which was designed to mimic NHS patient records system). The glove was also designed to incorporate wireless control with mobile phone systems, using inbuilt sensors, each finger could control user input without the phone being handled directly. A final addition was the integration of a full audio transmission and receiving system to the glove which allowed hands-free calls through the glove.


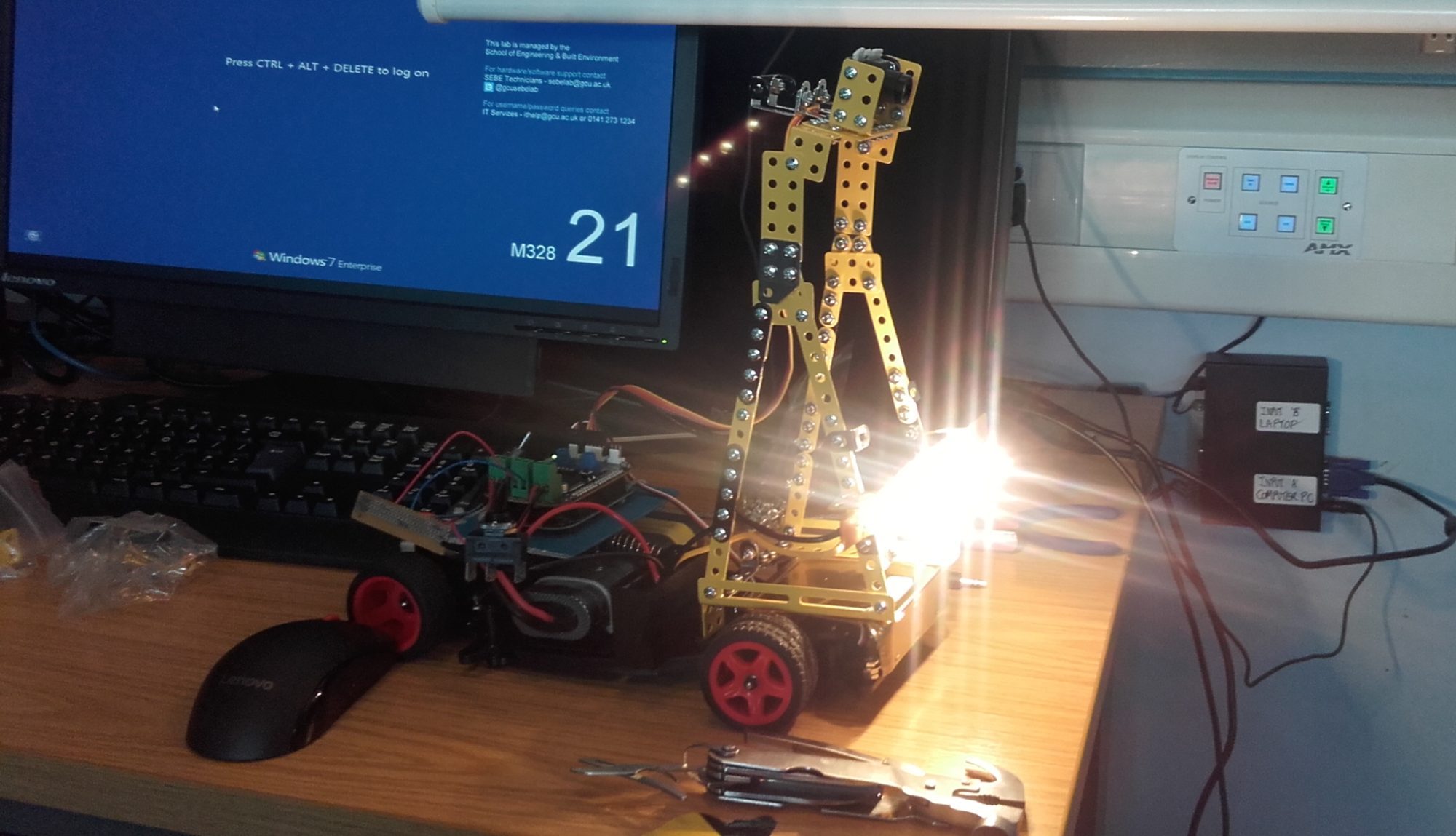
- Finally, my honour’s project was to design and build an Autonomous Vehicular Robot which could traverse a track comprised of Hills, Chicanes, Junctions and Slaloms while being controlled by a single camera, simple microcontroller and a single battery pack to power the whole device. This project required the construction of a chassis, the design of electrical circuitry, image processing, control systems and have all computations carried out via the C programming language. The production and testing of this autonomous robot was to be carried out by myself and only myself. A video showing the full production and testing of the Robot is below:
On top of my university education, I have worked in various computing and engineering environments.